Fecha de publicación: 29 Agosto 2021
Estado: Sitio web eliminado. Recuperado desde WayBack Machine
Recientemente, se ha podido ver a través del programa 119 de la Quinta Columna (Delgado, R.; Sevillano, J.L. 2021) un breve documental sobre las discusiones de los resultados que están arrojando los análisis de sangre de las personas vacunadas (Tim Truth. 2021a).0 Después de un cuidadoso visionado C0r0n@2Inspect ha llegado a la conclusión de que existen coincidencias, o al menos la identificación de varios patrones con nanotecnología, que podría estar orientada al ensamblaje de dispositivos espintrónicos con grafeno u óxido de grafeno, o bien la diseminación de fármacos, o bien la implementación de interfaces o sensores de activación remota, u otras aplicaciones que aún se están investigando.
En concreto se trata de la figura 1, en la que aparece un filamento ondulado, replegado, con una forma parecida a una cinta levemente enrollada.
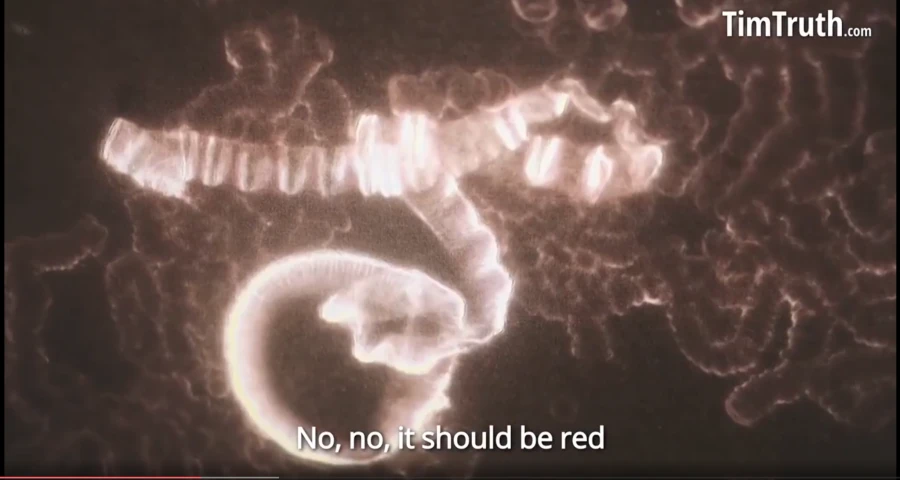
Pues bien, ésta forma fue vista en el artículo de (Chen, X.Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. 2017) relativo a nanorobots impulsados magnéticamente. En concreto se refiere a nanorobots nadadores blandos en forma de cinta hechos con hidrogeles que responden a estímulos, véase figura 2 y 3.
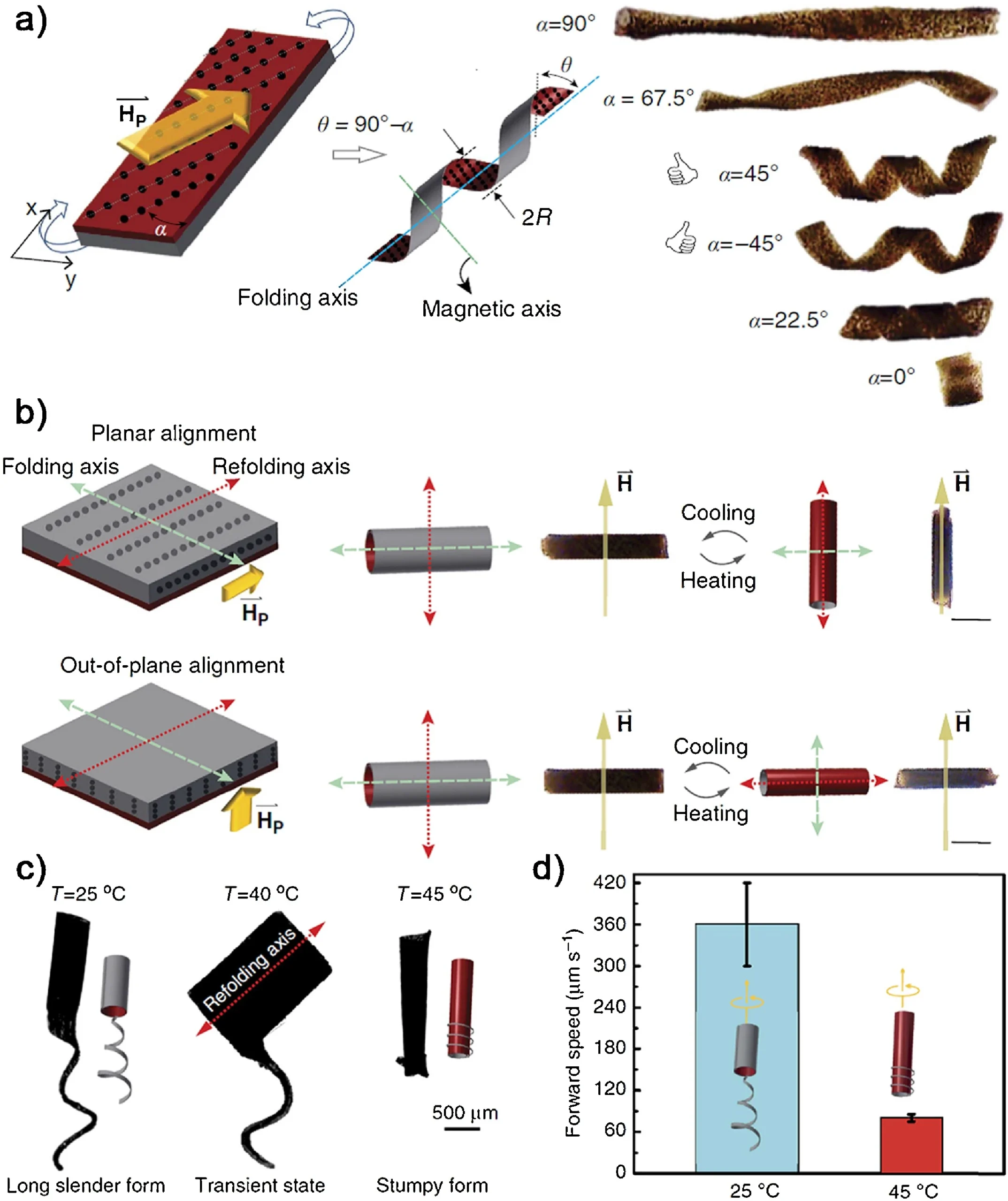
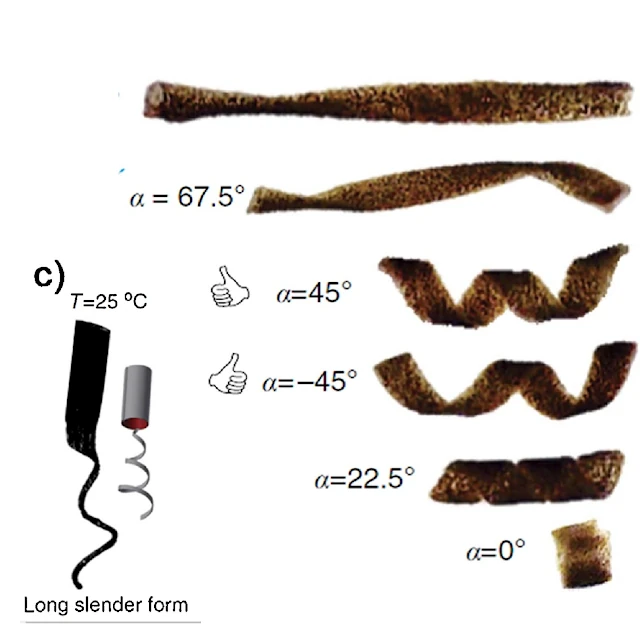
Si se observa el cuadro a) de la figura 2, en su margen derecho se puede comprobar cómo la forma del nanobot es casi idéntica a la que se puede ver en la figura 1. También puede comprobarse en el cuadro c) de la figura 2, donde se observa cómo el grosor de la cinta podría variar en función del diseño del flagelo del nanobot. En la figura 3, se puede observar una ampliación de los detalles referidos en la figura 2.
Según los investigadores del artículo en el que ha sido encontrado este patrón (Chen, X.Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. 2017), a fin de hacer accesible el uso de nanobots en biomedicina se requieren “materiales blandos sensibles a los estímulos“, que podrían ser provocados por un campo electromagnético. Además añaden que “el uso de estos materiales brinda la posibilidad de conectar la locomoción y las funcionalidades de los nadadores de pequeña escala para condiciones ambientales específicas“, como por ejemplo el medio acuoso que se podría encontrar en el torrente sanguíneo, en donde se ha encontrado el patrón de coincidencia. También añaden el ejemplo de (Huang, H.W.; Sakar, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. 2016) que explican de la siguiente forma “describieron un enfoque diferente para fabricar estructuras blandas reconfigurables como hélices y cabezas tubulares con colas helicoidales mediante fotolitografía (véase figura 2 y 3). El plegado de monocapas o bicapas de hidrogel podría predeterminarse convenientemente mediante la alineación de partículas magnéticas durante la secuencia de fabricación. La alineación de las nanopartículas magnéticas no solo dirigió el plegado de las estructuras de hidrogel y permitió su replegamiento mediante calentamiento NIR, sino que también determinó el eje de fácil magnetización de la estructura“. En esta explicación hay elementos que cuadran perfectamente con la existencia del óxido de grafeno en las vacunas de c0r0n@v|rus. De hecho, las nanopartículas magnéticas que pueden dirigir el plegado del nanobot pueden ser de óxido de grafeno, ya que es el único material que reacciona al calentamiento por NIR (Near Infrared) o infrarrojo cercano, tal como se justifica en los siguientes trabajos (Khan, M.S.; Abdelhamid, H.N.; Wu, H.F. 2015 | Liu, W.; Zhang, X.; Zhou, L.; Shang, L.; Su, Z. 2019 | Robinson, J.T.; Tabakman, S.M.; Liang, Y.; Wang, H.; Sanchez-Casalongue, H.; Vinh, D.; Dai, H. 2011 | Ji, M.; Jiang, N.; Chang, J.; Sun, J. 2014). Continuando con la revisión del trabajo de (Chen, X.Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. 2017) añaden una explicación a la forma del nanobot y a su interacción con infrarrojo “bajo exposición al infrarrojo cercano (NIR), las micromáquinas blandas con una cabeza tubular bicapa y un flagelo helicoidal monocapa podrían cambiar su morfología de una forma larga y delgada a una forma achaparrada. La forma larga y delgada consistía en una cabeza tubular bicapa con una cola monocapa, mientras que la morfología achaparrada correspondía a un tubo replegado con los flagelos envueltos alrededor de la punta de la cabeza. Si bien ambas estructuras podían actuar como sacacorchos bajo campos giratorios, la forma larga y delgada exhibía velocidades de avance más altas que la forma corta y achaparrada“. Curiosamente la forma delgada y alargada es la exhibida en la figura 1. Además los investigadores añaden que este tipo de “micromáquinas blandas son prometedoras para aplicaciones específicas de administración de fármacos“, lo cual hace pensar que con alta probabilidad esto sea lo que se observó en el documental emitido en (Tim Truth. 2021a) y el programa 119 de (Delgado, R.; Sevillano, J.L. 2021).
También se cita el trabajo de (Fusco, S.; Huang, H.W.; Peyer, K.E.; Peters, C.; Häberli, M.; Ulbers, A.; Pané, S. 2015) sobre microrobots para aplicaciones médicas, en el que se alude específicamente al desarrollo de estos ingenios y el “cambio de forma dinámica de las bicapas de hidrogel sobre su rendimiento para la navegación en los orificios corporales y la liberación de fármacos a demanda” y aún más importante “Los microrobots tubulares se fabrican acoplando un nanocompuesto de hidrogel termorresistente con una capa de diacrilato de poli(etilenglicol) (PEGDA), para lograr un plegado espontáneo y reversible a partir de una estructura rectangular plana. Las nanopartículas de óxido de grafeno (GO) o de óxido de hierro superparamagnético recubiertas de sílice se dispersan en la matriz de hidrogel termosensible para proporcionar sensibilidad a la luz del infrarrojo cercano (NIR) o activación magnética, respectivamente“. Esto coincide y confirma el óxido de grafeno en las vacunas, el uso de poli(etilenglicol), conocido como PEG, para su recubrimiento, la activación por infrarrojo y campos electromagnéticos (probablemente las ondas electromagnéticas del 5G entre otras). Finalmente se añade que “Estos conceptos finalmente se aplican a microrobots helicoidales para mostrar una posible forma de lograr un comportamiento autónomo“, lo que justifica y asegura que se aplica a microrobots con la forma de cinta helicoidal ya advertida. En el artículo se explica con detalle el procedimiento de fabricación del óxido de grafeno GO empleado en los prototipos, así como las bicapas de hidrogel y la caracterización de las nanopartículas magnéticas de Fe2O3 (muy próximo a la formulación Fe3O4). Por otra parte, hay que referir el experimento de administración de fármacos llevado a cabo en el que se fabricaron “microtubos sensibles a la luz NIR basados en GO de una manera similar al microrobot magnético. Después de la liofilización completa, se dejaron hinchados en una solución de colorante verde brillante (BG), para imitar un proceso de carga de un pequeño fármaco hidrófilo. Se utilizó luz NIR para inducir de forma remota el colapso de las matrices o el cambio de forma, y se registró y comparó el efecto sobre la cinética de liberación para ambos sistemas“. Además de la evidencia de la liberación o administración de fármacos, también se estudió el proceso de plegado de la cinta con un rango de temperaturas de entre 20º y 45º que resultaría compatible con la temperatura del cuerpo humano. El función de la temperatura la cinta de hidrogel adoptará un plegado diferente, tal como se muestra en la figura 5.

Opiniones
- Parece que existe una importante coincidencia en el patrón observado de la sangre de las personas vacunadas, según lo expuesto en (Tim Truth. 2021a) con los microrobots de cintas de hidrogel magnético (Chen, X.Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. 2017 | | Fusco, S.; Huang, H.W.; Peyer, K.E.; Peters, C.; Häberli, M.; Ulbers, A.; Pané, S. 2015 | Huang, H.W.; Sakar, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. 2016). Esta prueba permite inferir que las vacunas de c0r0n@v|rus administradas podrían contener, con alta probabilidad, este tipo de nanotecnología.
- Los robots nadadores (o microrobots de cinta de hidrogel magnético) encajan con todos los detalles conocidos sobre el óxido de grafeno, el magnetismo y los infrarrojos para su activación, control y guiado, en los fluidos corporales del cuerpo humano, especialmente el torrente sanguíneo. Además de la autonomía de movimientos y el cambio de forma en función de la temperatura, pueden servir a la entrega o suministro automático de fármacos. Por tanto, no sería extraño que el aumento en la temperatura del cuerpo, como reacción a la inoculación de la vacuna, provocará la activación y liberación de los fármacos que hipotéticamente podrían portar.
- Sin embargo, también es posible que estos mecanismos estuvieran mediados inalámbricamente por ondas electromagnéticas, que permitieran a la par la orientación de estos ingenios a objetivos o dianas en el cuerpo del huésped. Aunque el hidrogel PEGDA del nadador evita problemas de citotoxicidad de sobra conocidos con el óxido de grafeno, esto sólo sucede durante algún tiempo (12 semanas), hasta que se deshace (Browning, M.B.; Cereceres, S.N.; Luong, P.T.; Cosgriff‐Hernandez, E.M. 2014) y entra en contacto con la sangre y las células del cuerpo. En el peor de los casos se llegó a medir una duración de tan solo 4 días. Esto también podría aportar algunas claves para detectar casos de toxicidad tras la inoculación de las vacunas.
Bibliografía
- Browning, M.B.; Cereceres, S.N.; Luong, P.T.; Cosgriff‐Hernandez, E.M. (2014). Determinación del mecanismo de degradación in vivo de hidrogeles de PEGDA = Determination of the in vivo degradation mechanism of PEGDA hydrogels. Journal of Biomedical Materials Research Part A, 102(12), pp. 4244-4251. https://doi.org/10.1002/jbm.a.35096
- Chen, X.Z.; Hoop, M.; Mushtaq, F.; Siringil, E.; Hu, C.; Nelson, B.J.; Pané, S. (2017). Desarrollos recientes en micro y nanorobots impulsados magnéticamente = Recent developments in magnetically driven micro-and nanorobots. Applied Materials Today, 9, pp. 37-48. https://doi.org/10.1016/j.apmt.2017.04.006
- Delgado, R.; Sevillano, J.L. (2021). Nocturno Quinta Colummna – Programa 119. La Quinta Columna. https://odysee.com/@laquintacolumna:8/DIRECTONOCTURNODELAQUINTACOLUMNA-PROGRAMA119-:2
- Fusco, S.; Huang, H.W.; Peyer, K.E.; Peters, C.; Häberli, M.; Ulbers, A.; Pané, S. (2015). Microrobots que cambian de forma para aplicaciones médicas: la influencia de la forma en la administración y la locomoción de fármacos = Shape-switching microrobots for medical applications: The influence of shape in drug delivery and locomotion. ACS applied materials & interfaces, 7(12), pp. 6803-6811. https://doi.org/10.1021/acsami.5b00181
- Huang, H.W.; Sakar, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. (2016). Micromáquinas blandas con motilidad y morfología programables = Soft micromachines with programmable motility and morphology. Nature communications, 7(1), pp. 1-10. https://doi.org/10.1038/ncomms12263
- Ji, M.; Jiang, N.; Chang, J.; Sun, J. (2014). Actuadores bicapa altamente eficientes impulsados por luz infrarroja cercana basados en óxido de grafeno reducido modificado con polidopamina = Near‐infrared light‐driven, highly efficient bilayer actuators based on polydopamine‐modified reduced graphene oxide. Advanced Functional Materials, 24(34), pp. 5412-5419. https://doi.org/10.1002/adfm.201401011
- Khan, M.S.; Abdelhamid, H.N.; Wu, H.F. (2015). Activación superficial mediada por láser de infrarrojo cercano (NIR) de nanoflakes de óxido de grafeno para un tratamiento eficaz antibacteriano, antifúngico y de cicatrización de heridas = Near infrared (NIR) laser mediated surface activation of graphene oxide nanoflakes for efficient antibacterial, antifungal and wound healing treatment. Colloids and Surfaces B: Biointerfaces, 127, pp. 281-291. https://doi.org/10.1016/j.colsurfb.2014.12.049
- Liu, W.; Zhang, X.; Zhou, L.; Shang, L.; Su, Z. (2019). Hidrogel hibridado con óxido de grafeno reducido (rGO) como plataforma de doble respuesta de infrarrojo cercano (NIR) / pH para terapia combinada quimio-fototérmica = Reduced graphene oxide (rGO) hybridized hydrogel as a near-infrared (NIR)/pH dual-responsive platform for combined chemo-photothermal therapy. Journal of colloid and interface science, 536, pp. 160-170. https://doi.org/10.1016/j.jcis.2018.10.050
- Robinson, J.T.; Tabakman, S.M.; Liang, Y.; Wang, H.; Sanchez-Casalongue, H.; Vinh, D.; Dai, H. (2011). Óxido de grafeno ultrapequeño reducido con alta absorbancia en el infrarrojo cercano para terapia fototérmica = Ultrasmall reduced graphene oxide with high near-infrared absorbance for photothermal therapy. Journal of the American Chemical Society, 133(17), pp. 6825-6831. https://doi.org/10.1021/ja2010175
- Tim Truth. (2021a). Vaccine & Blood Analysis Under Microscope Presented By Independent Researches, Lawyers & Doctor. https://odysee.com/@TimTruth:b/microscope-vaccine-blood:9
- Tim Truth. (2021b). More Vaccine Bloodwork: Blood Cells Reportedly Clotting After Vaccine. https://odysee.com/@TimTruth:b/Blood-clotting-analysis:f